025-87793282-8003 18061654911
nbit@nbit6d.com

座机:025-87793282-8003
手机:18061654911
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼

六维力传感器的选型面临三个难点
难点一
传感器的量程和精度选择。传感器的精度和量程一般是反比关系。如果追求传感器的精度而选择小量程,那么传感器就容易损坏;如果选择大量程的传感器,那么传感器的精度就会比较低。如何既保证传感器不损坏,又使传感器的精度达到很大,这是一个挑战。
难点二
传感器能否适应复杂的应用场景。如下图在水中测量力和力矩的应用,蓝色的位置是一个六维力传感器,其安装了一个非常长的螺旋桨,因此受到的力矩非常大,而受到的力却不大。所以如何在力和力矩之间找到平衡,也是一个挑战。
再如下图搅拌摩擦焊的应用,传感器与主轴相连,主轴高速运动所产生的振动对传感器有没有影响?高温和粉尘对传感器有没有影响?这些都是难点。
难点三
传感器的安装和走线。对人形机器人来说,六维力传感器需要安装在踝关节和腕关节,而踝关节和腕关节的空间非常有限,所以传感器的安装位置和走线方式都是对设计的挑战。

轻型翼型长杆测试

搅拌摩擦焊高温粉尘

人形机器人
无论应用场景多么复杂,按照以下四个步骤就能选择合适的六维力传感器。
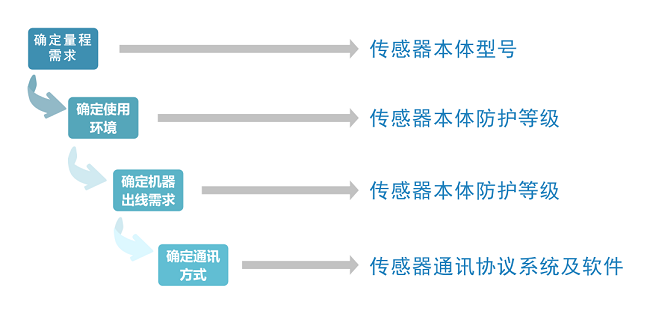
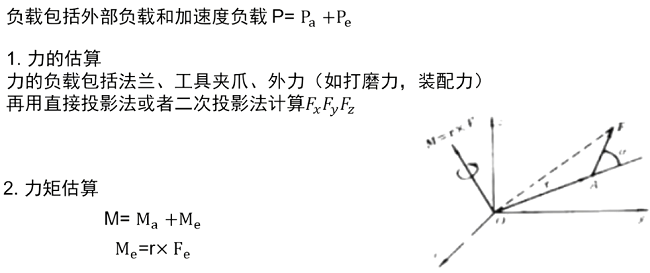
先是确定传感器的量程。在一个坐标系当中,根据法兰的重量、设计工具的夹爪、外力就能估算外部的负载,然后通过整体硬件设计来估算力矩。根据估算的力和力矩即可确定传感器的量程,并以此选择传感器的基础型号。
确定了传感器本体型号,第二步就要确定传感器的环境要求。常见的环境要求有:是否有高低温、粉尘、雨水、湿热、盐雾、霉菌、强光、核辐射、以及工业现场的磨削液。根据环境要求确定传感器所需的耐受性。

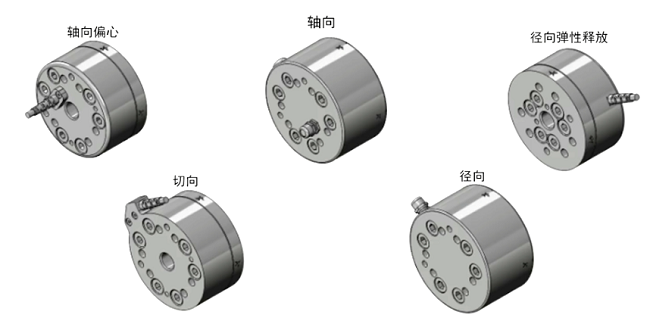
第三步是确定机械的出线方式。为了使传感器能安装在某个特定的狭窄部位,如机器人的关节或末端,传感器线缆的出线方式会有特定要求,例如:轴向偏心、弹性释放、径向出线、切向出线等。
第四步,确定好传感器通讯方式以及配套的通讯软件。神源生的通讯方式有六种:Ethernet,Ethercat,USB,CAN,485,232。
关于我们
南京神源生智能科技有限公司,2012年由南京航空航天大学教授戴振东创立,总部位于江苏省南京市江宁区。
基于多年的基础研究和技术攻关,在2018年承担了科技部重大研发计划《机器人用智能六维力和触觉传感器关键技术及产业化》项目,并作为课题二《智能六维力传感器的设计及批产》的承担单位。
神源生智能专注于力传感与力测控领域,在航天军工、机器人、自动化、医疗等领域构筑了力传感很全的模式优势,尤其在大量程、超大量程六维力传感器制造技术上独树一帜,为国家重大型号研发和特殊场景技术攻关做出贡献。
目前已为新松、埃斯顿、云深处 等机器人制造商客户、以及不同领域科研院所提供有竞争力的产品和服务,同时公司产品已销往英国、美国、德国、丹麦、瑞典等多个欧盟国家,打破了国外高精传感技术垄断局面,公司始终致力于构建更高效的人机协同的生产与应用环境,推动实现国内高新技术的飞跃。
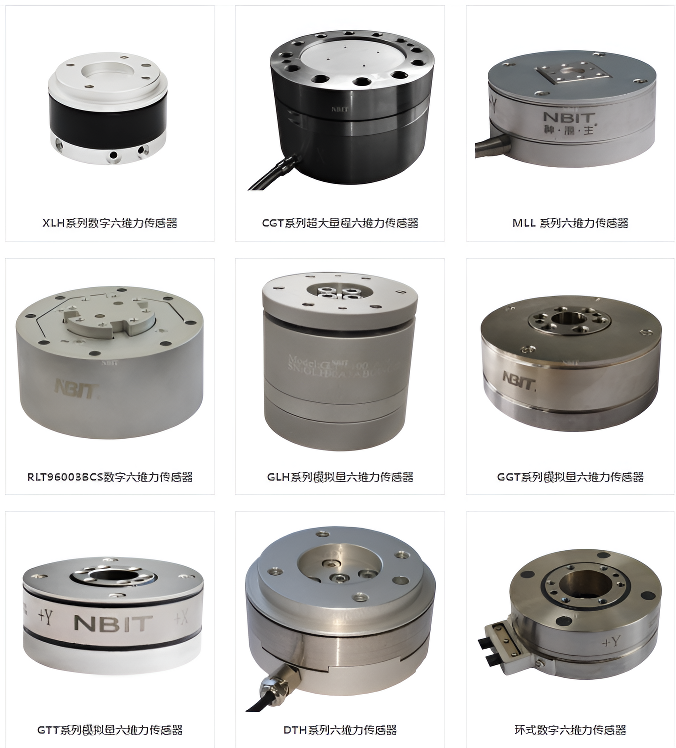
我们的产品
南京神源生智能科技有限公司
电话:025-87793282-8003
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
备案号:苏ICP备12038961号-3
技术支持:南京搜才信息技术有限公司

扫一扫关注我们

手机站