025-87793282-8003 18061654911
nbit@nbit6d.com

座机:025-87793282-8003
手机:18061654911
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
六维力传感器是一种能够同时测量空间三个正交力分量和三个力矩分量的测力装置,广泛应用于机器人装配、车辆测试及航空航天等行业。传感器采用差动电桥电路、多层屏蔽结构及温度补偿技术,使其在电磁干扰、温度波动及振动冲击等复杂工况下仍能输出低噪声、低漂移的力信号,确保测量数据的稳定性和可靠性,为力控系统提供准确反馈。
一、产品材质与结构特点
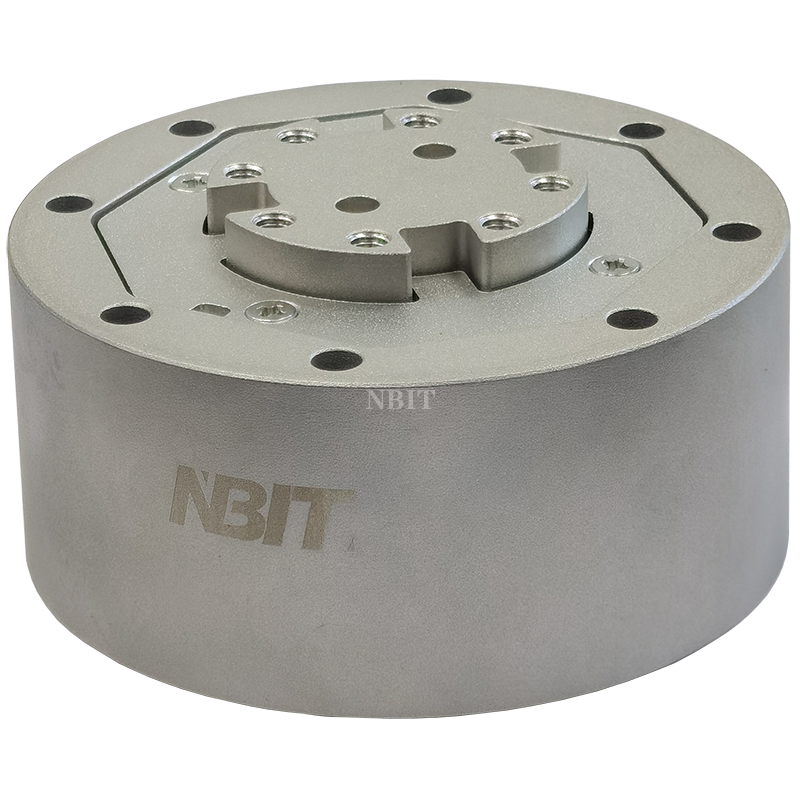
六维力传感器的弹性体选用高强度铝合金(7075-T6)或沉淀硬化不锈钢(17-4PH)制造。铝合金适用于中小量程(50N-5kN),重量轻且灵敏度高;不锈钢用于大量程或腐蚀性环境,刚度和耐久性较好。弹性体结构多为十字梁或八角环形式,各方向布置全桥温度自补偿型应变计。传感器外壳采用导磁不锈钢或铝合金加导电涂层,形成电磁屏蔽层。信号线缆为双绞屏蔽线,内部集成低通滤波电路,可滤除高频干扰。接口支持RS485、CAN、EtherCAT等数字通信,减少模拟信号传输中的衰减和感应噪声。
从结构特点来看,六维力传感器的抗干扰设计具备以下基本属性。
1.应变计采用差动全桥接法,抵消温度漂移和共模干扰,零点变化小于0.05%FS/℃。
2.传感器内置多层屏蔽,外部电磁场衰减可达60dB以上,可在变频电机、焊接设备附近稳定工作。
3.弹性体与外壳之间填充硅胶或环氧树脂,起到防振和防潮作用,振动冲击下输出无突变。
4.信号调理电路采用仪表放大器,共模抑制比(CMRR)大于100dB,有效抑制地环路的工频干扰。
5.数字输出型传感器采用光电隔离接口,避免接地回路干扰。

二、抗干扰设计与数据稳定优势
六维力传感器在复杂工况下的抗干扰能力和数据稳定性源于多项技术。在电磁干扰严重的工业现场(如机器人焊接车间、电火花加工设备旁),变频器和大电流电缆会产生强电磁场,普通传感器输出常出现噪声尖峰甚至数据跳变。而本传感器通过物理屏蔽和差分信号传输,将噪声水平控制在0.1%FS以内。温度变化是另一主要干扰源——温度改变会导致弹性体模量变化和应变计电阻漂移。通过全桥温度自补偿和软件线性校正,传感器在-20℃至80℃范围内零点漂移小于0.1%FS,灵敏度漂移小于0.05%FS/℃,满足户外或昼夜温差大的工况。
抗振动性能同样出色。在车辆道路测试或机器人高速运动时,高频振动会引起传感器本体的惯性力输出。六维力传感器通过优化弹性体质量和刚度分布,使其固有频率达到1kHz以上,远高于常见干扰振动频率,有效抑制共振引起的信号失真。数字滤波算法可进一步消除特定频段的噪声,用户可根据工况设置截止频率。
稳定的测量数据带来的优势:在精密装配中,力控系统不会因噪声误触发而卡停或损坏工件;在风洞测试中,长时间采集的数据曲线平滑,无需后处理滤波,节省分析时间;在机器人拖拽示教中,抗干扰性能使示教轨迹更加自然流畅,无需反复修正。
三、典型应用场景
六维力传感器的抗干扰能力使其在恶劣环境中发挥关键作用。
汽车耐久性测试中,安装于车轮力传感器上,在高速旋转和路面振动下持续采集六分力数据,信号稳定可靠。
注塑机锁模力监测中,抵抗电机和油泵的电磁干扰,长期监测无漂移。
水下机器人力反馈中,耐受深海高压和低频水流扰动,数据无突变。
航空发动机测试中,在高温强振动下仍能稳定输出推力数据。
四、使用与维护建议
使用六维力传感器时,应确保屏蔽线缆单端接地,避免形成接地环路。传感器安装面需与固定基座良好贴合,涂覆导热硅脂以均衡温度。在强电磁环境中,建议将传感器外壳与设备地线连接。每年进行一次零点校准和灵敏度复核,超出允许范围时返厂标定。存储时避免与强磁体靠近,保持干燥环境。
六维力传感器抗干扰能力强的技术特点及其在复杂工况下测量数据稳定的优势,有助于在恶劣环境中实现可靠的多维力采集。通过合理布线、接地和温度补偿,传感器能够为严苛工业应用提供长期稳定的力觉数据。
南京神源生智能科技有限公司
电话:025-87793282-8003
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
备案号:苏ICP备12038961号-3
技术支持:南京搜才信息技术有限公司

扫一扫关注我们

手机站