025-87793282-8003 18061654911
nbit@nbit6d.com

座机:025-87793282-8003
手机:18061654911
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
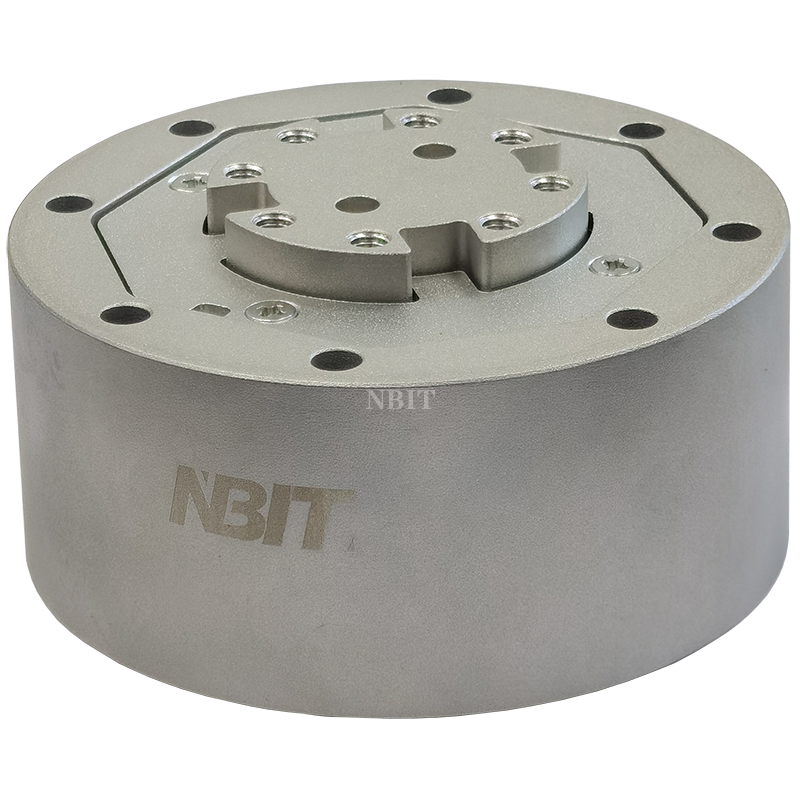
六维力传感器一般分成固定端(机器人端)和加载端(工具端)。两端相对受力时,传感器发生弹性变形,传感器内部的应变计电阻发生变化,进而转换成电压信号输出。使用时需要要根据具体的应用场合考虑,精度和分辨率决不能等同看待。分辨率是指传感器能分辨的较小信号,精度是指传感器测量值与标称值的较小差异。六维力传感器的精度一般在0.5%F.S以内,M38系列六维力传感器精度高达0.2%F.S,分辨率约为满量程的1/5000,能够满足各种应用需求。XYZ三维空间内施加在传感器上的力和扭矩都要考虑,外力/扭矩的大小较好是传感器量程范围的80%左右。
使用时的误区有,只考虑力,弯矩考虑不够。只考虑了外力大小,未考虑力臂(受力点离传感器中心的距离)引起的弯矩。空间未充分利用。夹具和工件很大,力传感器尺寸却很小。电气接口选型失误。电气接口选型不合适造成精度降低、分辨率不够、通信延时等问题。量程选择不合适。传感器量程用得过满,碰撞、误用、机器人移动加速度等引起力和力矩考虑不够。布置位置不合理。传感器离受力点太远,使得传感器承受了多余的力和力矩。
六维力传感器是一种特殊的力传感器,能够同时测量中性坐标系(OXYZ)内的三个力(FX、FY、FZ)和三个矩(MX、MY、MZ)。六维力传感器一类技术含量相当高的产品,在机器人、国防、汽车等领域都有重要应用。

南京神源生智能科技有限公司
电话:025-87793282-8003
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
备案号:苏ICP备12038961号-3
技术支持:南京搜才信息技术有限公司

扫一扫关注我们

手机站