025-87793282-8003 18061654911
nbit@nbit6d.com

座机:025-87793282-8003
手机:18061654911
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
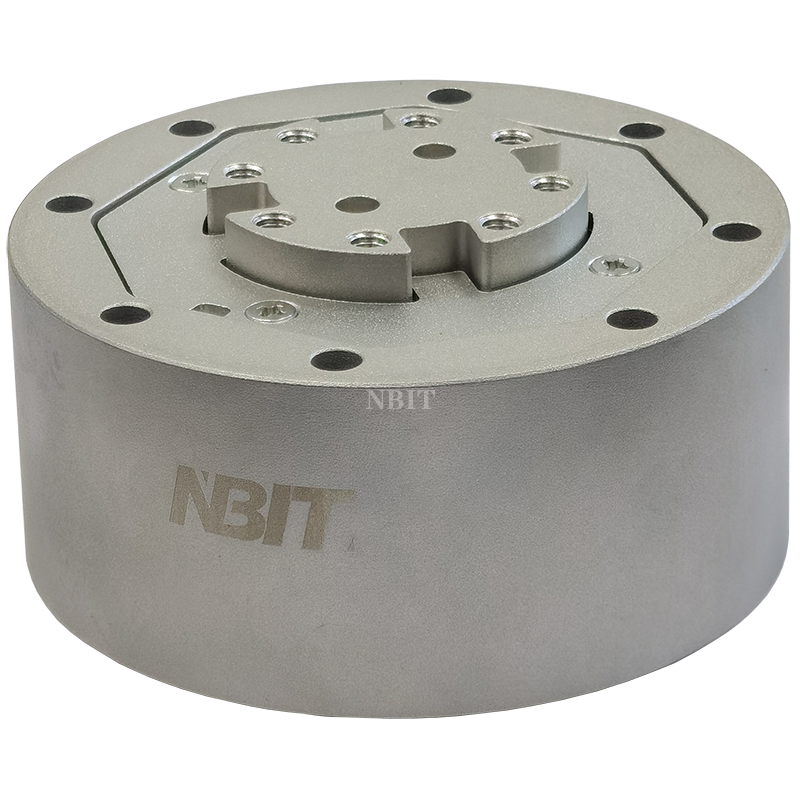
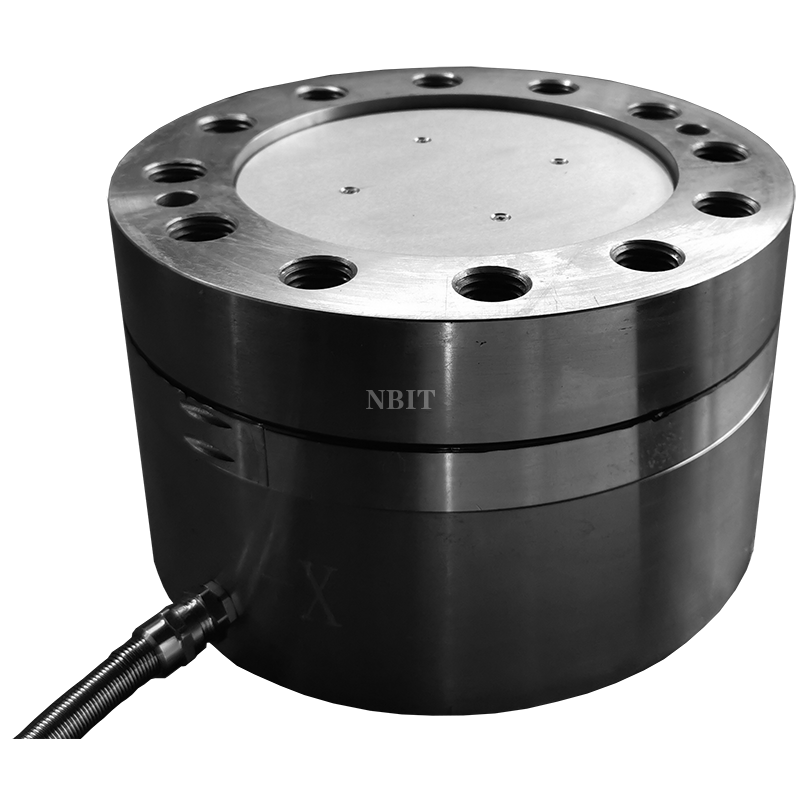
在工业机器人、精密制造、生物医疗等依赖多维度力感知的领域,六维力传感器的采样频率直接决定测量数据的准确性与可靠性。采样频率选择并非越高越好,需结合被测信号特性、应用场景需求及系统整体性能综合权衡,才能实现精准测量与高效运行的平衡。
核心原则:匹配被测信号的频率特性。根据Nyquist采样定理,采样频率需至少为被测信号高频率的2倍,才能避免出现“混叠”现象导致数据失真。但在实际应用中,考虑到动态力信号包含的复杂高频成分及抗混叠滤波器的过渡带限制,需预留充足余量。例如测量含1kHz主要成分的振动信号时,推荐选择5-10kHz的采样频率;对于冲击、碰撞等瞬态信号,采样频率需满足能捕捉信号上升沿细节,通常要求采样间隔不超过上升时间的1/10。

场景适配:结合应用工况精准选型。不同场景对采样频率的需求差异显著,高速动态场景需更高采样频率保障响应及时性。在高速包装机器人抓取、航天器部件冲击测试等场景,动作频率快、力信号变化剧烈,采样频率需达到1kHz以上,才能精准捕捉峰值力与力矩变化;而在大型船舶部件打磨、康复机器人步态监测等低速场景,力信号变化平缓,50-200Hz的采样频率即可满足需求。工业机器人应用中,采样频率还需与机器人控制周期匹配,通常应高于控制周期频率的数倍,确保信号及时反馈处理。
系统协同:兼顾硬件性能与运行效率。采样频率选择需考虑传感器固有频率,避免接近或超出传感器谐振频率导致信号失真,通常要求采样频率远低于传感器固有频率。过高的采样频率会增加数据存储压力与处理负荷,可能导致系统延迟,需在测量精度与运行效率间找到平衡。对于未知频率特性的信号,可先通过高采样率预测试分析频谱,再确定较好的采样频率。
六维力传感器采样频率的选择需遵循“信号匹配为核心、场景适配为导向、系统协同为保障”的原则。通过前期信号分析、场景工况评估及系统性能考量,合理设定采样频率,既能确保测量数据的真实性与完整性,又能提升系统运行效率,为各领域的精准力控应用提供可靠支撑。
南京神源生智能科技有限公司
电话:025-87793282-8003
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
备案号:苏ICP备12038961号-3
技术支持:南京搜才信息技术有限公司

扫一扫关注我们

手机站