025-87793282-8003 18061654911
nbit@nbit6d.com

座机:025-87793282-8003
手机:18061654911
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
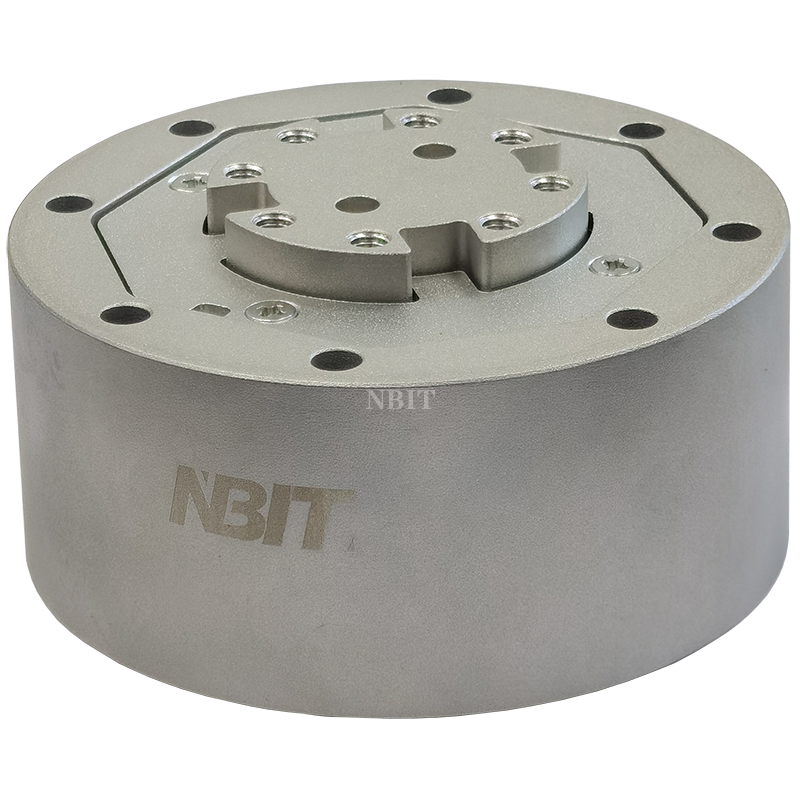
在现代工业自动化与精密测量领域,数字六维力传感器作为一种能够同时感知空间三个正交方向力分量(Fx、Fy、Fz)和绕这三个轴的力矩分量(Mx、My、Mz)的精密器件,正成为实现高精度力控与姿态感知的核心技术支撑。
数字六维力传感器的工作原理建立在力学转换与数字化处理的基础上。其核心是弹性体结构,当外部力或力矩作用于传感器时,弹性体会产生微小形变,粘贴在弹性体特定位置的应变片将这种形变转化为电阻变化,通过惠斯通电桥将电阻变化转换为微弱的电压信号。与传统模拟传感器不同,数字六维力传感器内置高精度 A/D 转换模块,可直接将模拟电信号转换为数字信号,再经专用芯片进行温度补偿、非线性修正、交叉耦合误差校准等处理,通过 RS485、EtherCAT 等工业总线输出标准化数字量。这种全数字化处理流程大幅提升了信号抗干扰能力,传输距离可达数百米,且能直接接入工业控制系统,简化了外围电路设计。
从结构设计来看,数字六维力传感器的弹性体需兼顾灵敏度与刚性。常见的弹性体结构有十字梁式、轮辐式、S 型、八角环式等,其中十字梁结构因具有各向同性好、交叉耦合误差小的特点被广泛采用。弹性体材料多选用高强度合金,如铝合金(适用于轻载场景)、不锈钢(兼顾强度与耐腐蚀性)、钛合金(适用于高精度、轻量化需求),经热处理后可在保证 0.1μm 级形变灵敏度的同时,承受数倍于额定载荷的冲击力。传感器外壳通常采用密封设计,防护等级可达 IP65/IP67,能适应工业现场的粉尘、油污环境。

数字六维力传感器的技术性能指标主要包括测量范围、精度与动态特性。测量范围覆盖从 ±5N 到 ±500kN 的力分量及 ±0.5N・m 到 ±50kN・m 的力矩分量,可满足从微纳操作到重型装备的不同需求。精度指标中,非线性误差一般控制在 0.1%~1% FS(满量程),滞后误差≤0.1% FS,重复性误差≤0.05% FS,交叉耦合误差通过算法补偿后可降至 0.5% FS 以下。动态响应频率较高可达 10kHz,能精准捕捉快速变化的冲击力或瞬时力矩,适用于机器人快速装配、碰撞检测等动态场景。
在应用场景中,数字六维力传感器展现出强大的适配能力。在工业机器人领域,装配机器人通过其感知轴承压装力的三维分量,可实现 “力控装配”,当检测到过大力矩时自动调整姿态,避免零件损伤,装配精度可达 0.01mm 级;打磨机器人利用六维力反馈实时调整打磨头压力,使曲面工件表面粗糙度控制在 Ra0.8μm 以内。协作机器人集成该传感器后,能通过识别碰撞力的大小与方向,在 50ms 内触发急停,确保人机协作安全。
高端制造领域中,航空发动机叶片的精密磨削过程依赖六维力传感器实时监控磨削力,结合数控系统实现自适应进给;半导体封装设备通过微六维力传感器(量程 ±10N)感知芯片键合力,保证金丝球焊的强度一致性。在科研领域,生物力学实验中用于测量关节运动的三维受力,材料力学测试中分析构件在复杂载荷下的应变状态,均离不开其精准测量能力。
随着智能制造的发展,数字六维力传感器正朝着小型化、集成化方向演进。新型 MEMS 工艺制成的微型传感器体积仅为传统产品的 1/5,可嵌入微创手术机器人的末端执行器;集成温度、湿度、振动等环境传感器的复合感知单元,能在复杂工况下提供更全面的状态评估。同时,基于人工智能的动态误差补偿算法进一步提升了传感器在宽温域(-40℃~125℃)、强电磁环境下的测量稳定性。
作为连接物理世界与数字系统的关键接口,数字六维力传感器通过精准捕捉多维力信息,为设备赋予了类似人类触觉的感知能力,推动着工业自动化从 “视觉引导” 向 “力觉反馈” 的深度升级,成为智能制造、精密工程等领域不可或缺的核心感知器件。
南京神源生智能科技有限公司
电话:025-87793282-8003
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
备案号:苏ICP备12038961号-3
技术支持:南京搜才信息技术有限公司

扫一扫关注我们

手机站