025-87793282-8003 18061654911
nbit@nbit6d.com

座机:025-87793282-8003
手机:18061654911
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
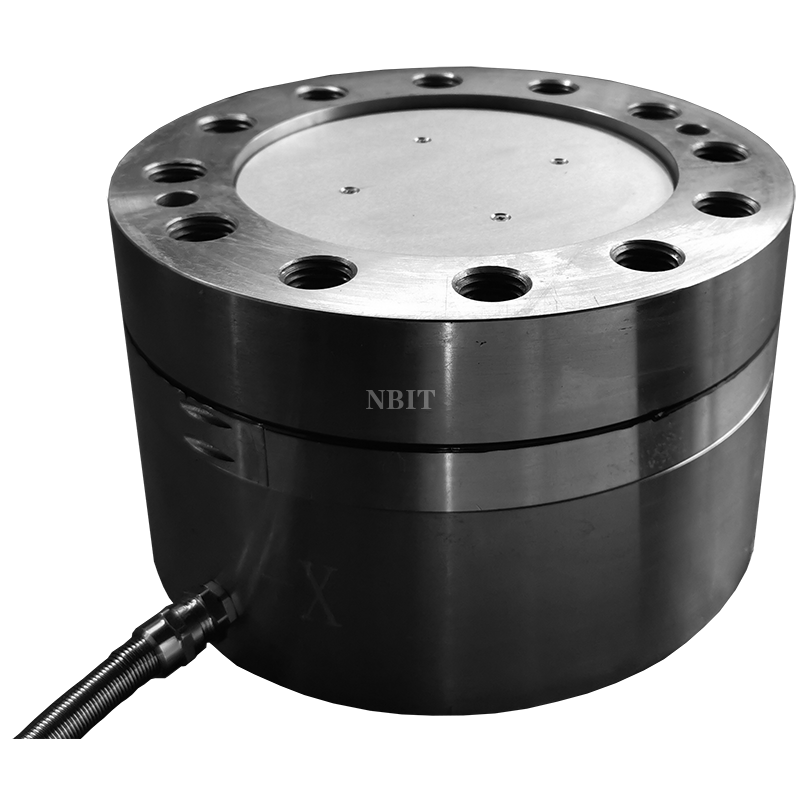
六维力传感器的零飘误差是指在没有施加外力或扭矩时,传感器所测量的输出不为零的偏差值。与理想情况下的传感器输出为零相比,零飘误差会引入不确定性和误差。
造成六维力传感器零飘误差的主要原因有以下几个方面:
传感器本身的制造和加工工艺:在制造和加工过程中可能存在一些误差源,例如材料的不均匀性、传感器的几何结构不完全,这些因素都可能导致零飘误差的产生。
温度变化:温度的变化会引起传感器内部零点漂移或温度敏感性,从而导致零飘误差。因为温度的变化会导致材料的热膨胀和收缩,传感器内部的结构或材料参数可能发生变化,从而造成零飘误差。
电子噪声:电子噪声是指由于电子元件的非理想性、电磁干扰等因素引起的传感器输出误差。电子噪声可能导致传感器输出的随机波动,使得零飘误差变得不确定。
静电影响:当传感器与周围环境接触时,静电可能引起电荷的积累。这些电荷可以干扰传感器的输出信号,导致零飘误差。
为了减小六维力传感器的零飘误差,可以采取以下几种方法:
定期校准:通过使用已知负载进行定期校准,可以检测和纠正传感器的零飘误差。
温度补偿:通过测量传感器的温度并进行补偿,可以减小温度变化对传感器的零飘误差的影响。
电子滤波:使用电子滤波器可以降低传感器输出中的噪声成分,从而减小零飘误差。
隔离保护:将传感器与外部环境隔离,减少外界因素对传感器的影响,可以减小静电和其他电磁干扰对传感器的零飘误差的影响。

南京神源生智能科技有限公司
电话:025-87793282-8003
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
备案号:苏ICP备12038961号-3
技术支持:南京搜才信息技术有限公司

扫一扫关注我们

手机站