
025-87793282-8003 18061654911
nbit@nbit6d.com

座机:025-87793282-8003
手机:18061654911
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼

第四届国际仿生工程学术会议在南京航空航天大学开幕,南京航空航天大学仿生结构与材料防护研究所的研究人员展示了该所研制的仿壁虎机器人。供应运动力学测试系统来自国内主要高校、科研院所以及美国、英国、澳大利亚、日本等国家和地区仿生领域的知名专家学者、产业界代表约300人与会,就生物力学、仿生结构、人工智能等国内外仿生工程研究的热点课题进行交流,并展示最新的科研和技术成果。在现场展台上,几只“壁虎”的出现立即引发全场的啧啧赞叹,走近后才发现是由许多铝合金机构、电子元件组成的仿生机器人。科学家对电脑一番操作后,只见这只“壁虎”摇头摆尾活动起来,沿着一张倾斜的墙面攀爬上去。这种壁虎有什么用呢?据了解,供应运动力学测试系统科研人员正在将这项爬墙技术投用于地震探测等领域。
我国康复机器人的研发起步较早,】国内多家公司的康复机器人产品实现了样机及产业化推广。与国外进口康复机器人相比,我国本土的康复机器人具有高性价比等优势。由于残疾人家庭人均可支配收入较低,高性价比的康复机器人将更适合市场需求,未来将占据较高的市场份额。政策方面,今年4月工信部、发改委等三部委联合印发了《机器人产业发展规划(2016-2020年)》,提出到2020年我国工业机器人年产量达到10万台。其中,六轴及以上机器人达到5万台以上,机器人密度达到150台以上,服务机器人年销售收入超过300亿元,在助老助残、医疗康复等领域实现小批量生产及应用,培育3家以上的龙头企业,打造5个以上机器人配套产业集群。在系列政策支持以及市场需求提升的带动下,我国机器人产业将迎来快速发展机遇。

使用其他接口。当通讯接口为RS485/RS232时,需要一条RS485/RS232转USB转接线和转接头,电脑端与U盘中的驱动软件安装,这样软件界面的COM口选择安装好驱动后出现的COM3或者COM5,Band Rate选择4800,下方的Acquisition Rate选择1-20的数字,其他操作方式与UDP接口的操作相同。当通讯接口是USB时,需要一条一头是USB,另一头是网线的线进行连接采集器。六维力传感器厂家对于数据采集器与配套软件的使用今天就说到这里,欢迎大家前来选购我们的产品。

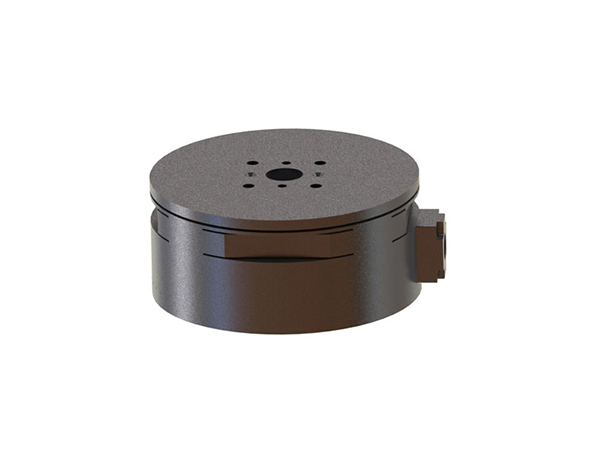
NBIT多维力传感器5个部件的功能分别如下: 1、弹性元件(弹性体):其为测力敏感元件,是传感器的核心器件, 弹性体的结构将直接影响着传感器的各项性能和可靠性;2、上盖板:其作用是保护弹性体,防水;3、下盖板:其作用是保护弹性体和电路板,防水;4、电源组桥板:顾名思义,组桥并且为各个桥路供压,根据实际情况,有些传感器会将组桥板和电源板分开;5、电源板接口:与引线相连,与终端连接。NBIT多维力传感器耦合低、精度高、稳定性好!
南京神源生智能科技有限公司
电话:025-87793282-8003
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
备案号:苏ICP备12038961号-3
技术支持:南京搜才信息技术有限公司

扫一扫关注我们

手机站

